


 摘要:
...
摘要:
... 一、产品介绍¶
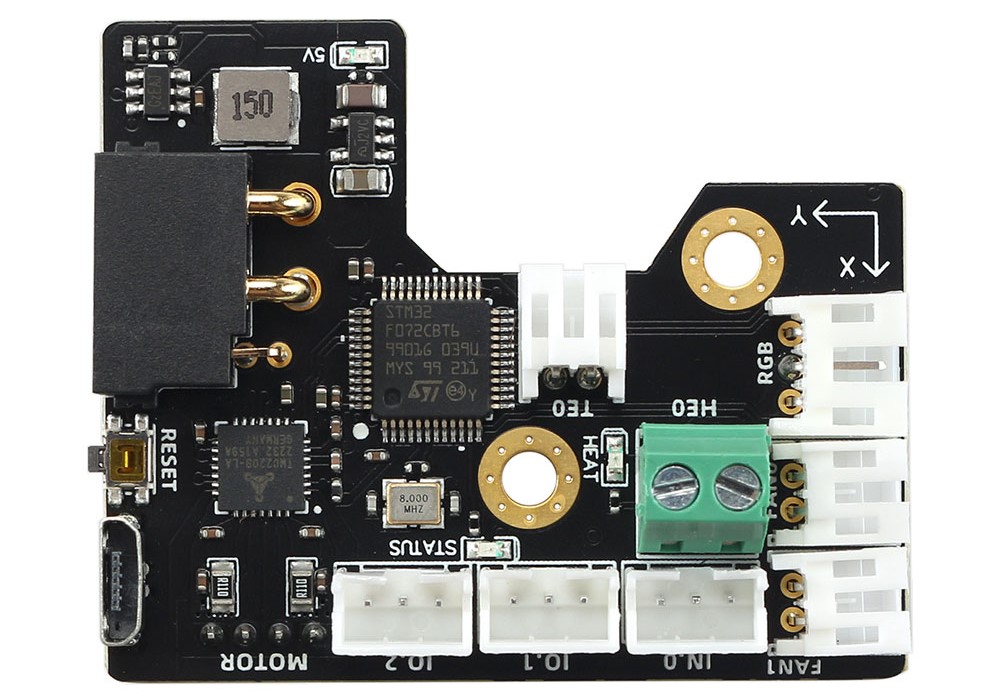
[youbanshan] 3D打印 蜘蛛主板 第1张")
 3D打印 蜘蛛主板 第2张")
 3D打印 蜘蛛主板 第3张")
SPIDER是一款小巧但功能强大的3D打印机控制板。在有限的空间内,它集成了8个步进电机驱动器,5A 12V电源,8A 5V电源,为各种电压的粉丝,各种RGB灯带和树莓派提供强大的能量。您可以通过 SPIDER 构建功能丰富的 3D 打印机。特别是对于VORON V2.4,我们在设计初期就与VORON团队合作,很多功能都得到了VORON团队的认可。如果您正在构建 VORON,这将是您的最佳选择。
1.1 更改日志
1.1.1 蜘蛛v1.1¶
为 BL-Touch 添加 5 针连接器
 3D打印 蜘蛛主板 第4张")
开关 EXP1 和 EXP2 标记(仅标记,不插座)
 3D打印 蜘蛛主板 第5张")
添加±标记
 3D打印 蜘蛛主板 第6张")
为 RaspberryPI USB-A 电源端口增加空间
您可以焊接下面的 USB 端口,然后可以使用 USB-A 电缆为 RPI 供电。它是没有USB信号的USB电源端口。
 3D打印 蜘蛛主板 第7张")
1.1.2 蜘蛛v2.x¶
V2.0版本
增加 48V 步杆支持 x3
为每个踏脚杖插座添加 TVS 和防出血性
将 12V/5A 更改为 SY8205
将 Raspberry Pi 5V 和系统 5V 更改为单独的 DC-DC 电路(每通道 3A)
为步进杆添加单独的 3.3V 电压
将 PCB 更改为 6 层
优化一些布线。
将驱动电路的串联二极管改为15A保险丝(1808)
V2.1版
将 48V 步进杆支持更改为 2
将 12V/5A 更改为 12V/3A
更改 Raspberry Pi 5V(3A 到 5A)和系统 5V(5A 到 3A)
添加 RESET 1x2 排针
V2.2版
增加两个热敏电阻插座,共6个。
将 FAN0 更改为 PA13,将 FAN1 更改为 PA14
在底部添加引脚定义丝印。
V2.3版本
将 12v-24v RGB 端口布局更改为 3 个风扇端口,可以更方便地用作风扇端口,同时仍保持对 RGB 输出的支持
优化风扇控制电路,将缓冲芯片升级为独立三极管控制,增强稳定性,大大提高安全性能
所有电机驱动模块接口通信网络都增加了高压缓冲和电压钳位处理,为MCU增加了一个屏蔽
重新布局PCB,连接器位置更改
2. 特点¶
紧凑尺寸:155.3mm x 76.5mm
基于STM32F446 180Mhz,所有IO均可承受5V电压
支持 8 个 TMC 步进驱动器,支持 Uart&SPI
V2.2:增加2个60V-Max步进驱动器插槽
再次改进TMC跳线设置,更简单易行
V1.0&V1.1: 最大28V输入,12V@5A DC-DC,5V@8A DC-DC(树莓派专用),3.3V@0.8A LDO
V2.2: 最大28V输入,12V@3A DC-DC,5V@5A DC-DC(用于树莓),5V@3A DC-DC(用于MCU和RGB),两个用于MCU和电机的3.3V@0.8A LDO
两个汽车保险丝,用于热床输入和主电源输入
限位开关插座24V/5V/3.3V可选,可用于更多其他设备,如电感式传感器、BL-Touch
XH2.54 连接器
10 个支持 PWM 的功率 MOSFET 输出(1 个用于 HotBed,3 个用于热端,3 个用于风扇,3 个用于 RGB LED 灯条)
V1.0&V1.1:3pin温度接头,可以使用热敏电阻或热电偶(需要AD597模块)
V2.2:支持多达 6 个温度传感器
多达 8 路 PWM 风扇(仅使用 1 路 extrueder,不使用 12V/24V RGB),2 路 RGB LED(12V 和 24V 可选),1 路 5V-RGB LED (NEO-PIXEL/WS2812)
板载 RepRapDiscount SmartController 兼容排针
UART1-树莓派排针(含5V@8A电源)
用于 SD 卡模块的 2X4 引脚接头输出
板载 micro-SD 卡
Type-C 和 Type-B USB 连接器可选
EXP1 和 EXP2 具有更多的多路复用功能,例如 USART、I2C、CAN
SD卡和USB上传支持
使用4.7kOhm 0.1%温度传感器上拉电阻,PT1000可直接连接。对于 PT100,必须使用放大器板。
V2.2:增加更多保护(每个电机潜水员的TVS,限流电阻,VMOT保险丝)
3. 硬件指南¶
3.1 蜘蛛接线¶
 3D打印 蜘蛛主板 第8张")
3.1.2 Spider v1.1 接线
 3D打印 蜘蛛主板 第9张")
3.1.3 Spider v2.2 接线
 3D打印 蜘蛛主板 第10张")
48V 和 24V 连接器
 3D打印 蜘蛛主板 第11张")
VORON 2.4 的 Spider v2.2 接线
 3D打印 蜘蛛主板 第12张")
VORON Trident 的 Spider v2.2 接线
 3D打印 蜘蛛主板 第13张")
Spider v2.2 加力工具头接线
 3D打印 蜘蛛主板 第14张")
3.1.4 Spider v2.3 接线
 3D打印 蜘蛛主板 第15张")
VORON 2.4(沃龙2.4) 的 Spider v2.3 接线
 3D打印 蜘蛛主板 第16张")
VORON Trident(沃龙三叉戟) 的 Spider v2.3 接线
 3D打印 蜘蛛主板 第17张")
SPIDER V2.3 加力工具头接线¶
 3D打印 蜘蛛主板 第18张")
3.1.5 Spider v2.3 CAN接线
 3D打印 蜘蛛主板 第19张")
 3D打印 蜘蛛主板 第20张")
3.2 接线:FYSETC mini 12864 v2.1¶
注意/NOTICE:¶
为了兼容某些主板,如RAMPS1.4,FYSETC mini12864 设置了 RST(R3) 和 KILL(R4) 的可选择电阻。目前,有些主板(S6/Spider)将 KILL 换成 5V,此时,请确认FYSETC mini12864 上 R4处于空贴状态,否则按下屏幕上的按钮会致使 5V 与 GND 短路,长时间操作会导致主板损坏。
为了兼容某些主板,例如 RAMPS1.4,mini12864 配备了 RST (R3) 和 KILL (R4) 可选电阻。目前,一些主板(S6/Spider)将KILL改为5V。此时请确保 mini12864 上没有 R4(如果在板上,请将其取下),否则按下屏幕上的按钮会导致 5V 和 GND 短路,长时间操作会导致主板损坏。
目前发现有些主板在接上 mini12864,并采用 USB 进行烧录时会导致无法烧录的情况,请去除 R1 10K 电阻。
目前,如果 mini12864 连接到开发板,部分 Spider 无法使用 USB 上传固件,如果遇到此问题,请移除 R1 电阻。
布线¶
 3D打印 蜘蛛主板 第21张")
 3D打印 蜘蛛主板 第22张") |  3D打印 蜘蛛主板 第23张") |
3.3 接线 : TMC2209¶
 3D打印 蜘蛛主板 第24张")
3.4 接线:树莓派¶
蜘蛛 1.X, 蜘蛛 2.2¶
 3D打印 蜘蛛主板 第25张")
蜘蛛 2.3¶
 3D打印 蜘蛛主板 第26张")
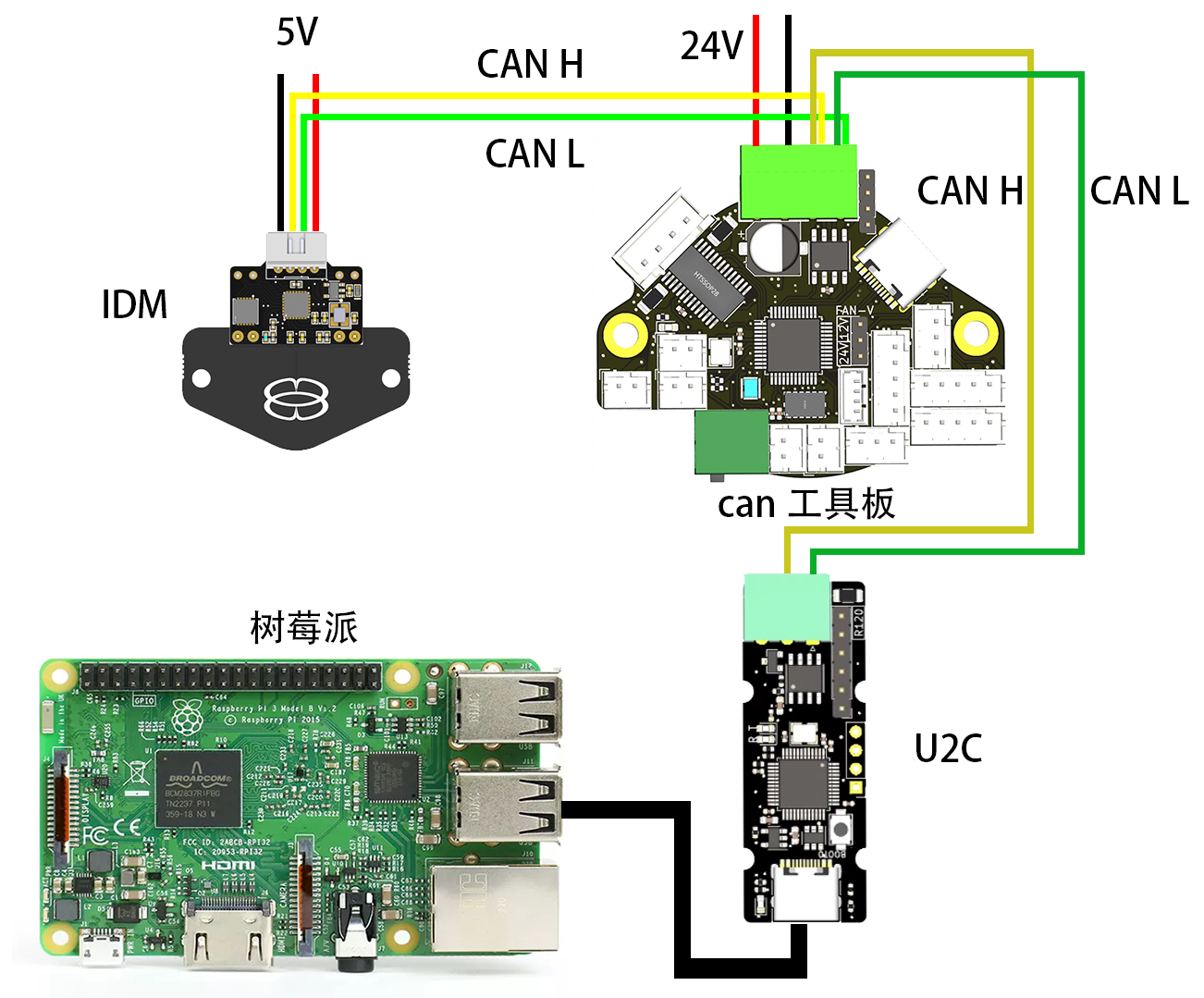
CAN总线¶
如果您想在 Klipper 中启用 Spider CANBUS 网络,请查看 4.2.1 章节部分。Communication interface
 3D打印 蜘蛛主板 第27张")
3.5 引脚输出¶
3.5.1 蜘蛛v1.x¶
 3D打印 蜘蛛主板 第28张")
3.5.2 蜘蛛v2.2¶
 3D打印 蜘蛛主板 第29张")
3.5.3 蜘蛛v2.3¶
 3D打印 蜘蛛主板 第30张")
3.6 引脚定义¶
3.6.1 蜘蛛v1.x¶
| 特征 | 蜘蛛针 | STM32引脚 | 引脚编号 | 评论 |
| X电机(1) | X步 | PE11型 | 42 | |
| X-DIR | PE10型 | 41 | ||
| X-EN系列 | PE9型 | 40 | ||
| X-CS/PDN 系列 | PE7型 | 38 | ||
| Y型电机(2) | Y 步 | PD8型 | 55 | |
| Y-DIR | PB12型 | 51 | ||
| Y-EN型 | PD9型 | 56 | ||
| Y-CS/PDN 型 | PE15型 | 46 | ||
| Z型电机(3) | Z-步 | PD14型 | 61 | |
| Z-DIR型 | PD13型 | 60 | ||
| Z-EN系列 | PD15型 | 62 | ||
| Z-CS/PDN 系列 | PD10型 | 57 | ||
| E0-电机(4) | E0 步 | PD5型 | 86 | |
| E0-DIR | PD6型 | 87 | ||
| E0-英语 | PD4型 | 85 | ||
| E0-CS/PDN系列 | PD7型 | 88 | ||
| E1电机(5) | E1 步 | PE6型 | 5 | |
| E1-DIR | PC13型 | 7 | ||
| E1-英语 | PE5型 | 4 | ||
| E1-CS/PDN系列 | 个人电脑14 | 8 | ||
| E2电机(6) | E2 步 | PE2型 | 1 | |
| E2-DIR | PE4型 | 3 | ||
| E2-EN | PE3型 | 2 | ||
| E2-CS/PDN系列 | 个人电脑15 | 9 | ||
| E3电机(7) | E3 步 | PD12型 | 39 | |
| E3-DIR | 个人电脑4 | 33 | ||
| E3-EN | PE8型 | 59 | ||
| E3-CS/PDN系列 | 聚酰胺15 | 77 | ||
| E4电机(8) | E4 步 | PE1型 | 34 | |
| E4-DIR | PE0型 | 97 | ||
| E4-EN | 个人电脑5 | 98 | ||
| E4-CS/PDN系列 | PD11型 | 58 | ||
| TMC 驱动器 SPI (SPI4) | 莫西 | PE14型 | 45 | |
| 酱 | PE13型 | 44 | ||
| 鳞片 | PE12型 | 43 | ||
| 止动器 | X-分钟 | PB14型 | 53 | 与 X-DIAG 共享 |
| X-MAX的 | 聚酰胺1 | 24 | 与 E0-DIAG 共享 | |
| Y-最小值 | PB13型 | 52 | 与 Y-DIAG 共享 | |
| Y-MAX (英语:Y-MAX) | 质量保证 | 25 | 与 E1-DIAG 共享 | |
| Z-分钟 | 质押 | 23 | 与 Z-DIAG 共享 | |
| Z-MAX(探头) | 卡塔尔 | 26 | 与 E2-DIAG 共享 | |
| 风扇/RGB | 风扇0 | 溴化PB0 | 35 | |
| 风扇1 | PB1型 | 36 | ||
| FAN2 | PB2/BOOT1 | 37 | ||
| LED-R | PB6 | 92 | Can be used for fan3 | |
| LED-G | PB5 | 91 | Can be used for fan4 | |
| LED-B | PB7 | 93 | Can be used for fan5 | |
| 5V-LED(WS2812) | PD3 | 84 | Share with flash indicator(Bootloader) | |
| Heating | E0-Heater | PB15 | 54 | |
| E1-Heater | PC8 | 65 | ||
| E2-Heater | PB3 | 89 | ||
| Heated-Bed | PB4 | 90 | ||
| Temperature | TE0(THERM0) | PC0 | 15 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. |
| TE1(THERM1) | PC1 | 16 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| TE2(THERM2) | PC2 | 17 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| TB(THERM3) | PC3 | 18 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| EXP2 | LCD_D7 | PD1/CAN-TX1 | 82 | Share with CAN-TX1 |
| LCD_D6 | PD0/CAN-RX1 | 81 | Share with CAN-RX1 | |
| LCD_D5 | PC12/MOSI3/TX5/SDA2 | 80 | ||
| LCD_D4 | PC10/SCK3/TX3/4 | 78 | ||
| LCD_EN | PC11/MISO3/RX3/4 | 79 | ||
| LCD_RS | PD2/RX5 | 83 | ||
| ENC_C | PA8/SCL3 | 67 | ||
| BEEP | PC9/SDA3 | 66 | ||
| EXP1 | RESET | NRST | 14 | |
| ENC_A | PC6/TX6 | 63 | ||
| ENC_B | PC7/RX6 | 64 | ||
| SD-DET | PB10/SCL2 | 47 | ||
| SD-MISO | PA6/MISO1 | 31 | ||
| SD-MOSI | PA7/MOSI1 | 32 | ||
| SCK | PA5/SCK1 | 30 | ||
| CS | PA4/CS1 | 29 | ||
| EEPROM(4K) I2C Pin-Out | SCL | PB8/SCL1 | 95 | Connect to 24LC32(4K EEPROM) |
| SDA | PB9/SDA1 | 96 | Connect to 24LC32(4K EEPROM) | |
| Pi_PWR/UART | TX | PA9/TX1 | 68 | |
| RX | PA10/RX1 | 69 | ||
| SWD Debug | PA13/SWDIO | 72 | only used for debugging now and can be used for other purposes. | |
| PA14/SWCLK | 76 | only used for debugging now and can be used for other purposes. | ||
3.6.2 Spider v2.x¶
| Features | Spider Pin | STM32 Pin | Pin No. | Comment |
| X-MOTOR(1) | X-Step | PE11 | 42 | |
| X-DIR | PE10 | 41 | ||
| X-EN | PE9 | 40 | ||
| X-CS/PDN | PE7 | 38 | ||
| Y-MOTOR(2) | Y-Step | PD8 | 55 | |
| Y-DIR | PB12 | 51 | ||
| Y-EN | PD9 | 56 | ||
| Y-CS/PDN | PE15 | 46 | ||
| Z-MOTOR(3) | Z-Step | PD14 | 61 | |
| Z-DIR | PD13 | 60 | ||
| Z-EN | PD15 | 62 | ||
| Z-CS/PDN | PD10 | 57 | ||
| E0-MOTOR(4) | E0-Step | PD5 | 86 | |
| E0-DIR | PD6 | 87 | ||
| E0-EN | PD4 | 85 | ||
| E0-CS/PDN | PD7 | 88 | ||
| E1-MOTOR(5) | E1-Step | PE6 | 5 | |
| E1-DIR | PC13 | 7 | ||
| E1-EN | PE5 | 4 | ||
| E1-CS/PDN | PC14 | 8 | ||
| E2-MOTOR(6) | E2-Step | PE2 | 1 | |
| E2-DIR | PE4 | 3 | ||
| E2-EN | PE3 | 2 | ||
| E2-CS/PDN | PC15 | 9 | ||
| E3-MOTOR(7) | E3-Step | PD12 | 39 | |
| E3-DIR | PC4 | 33 | ||
| E3-EN | PE8 | 59 | ||
| E3-CS/PDN | PA15 | 77 | ||
| E4-MOTOR(8) | E4-Step | PE1 | 34 | |
| E4-DIR | PE0 | 97 | ||
| E4-EN | PC5 | 98 | ||
| E4-CS/PDN | PD11 | 58 | ||
| TMC Driver SPI (SPI4) | MOSI | PE14 | 45 | |
| MISO | PE13 | 44 | ||
| SCK | PE12 | 43 | ||
| End-stops | X-MIN | PB14 | 53 | Share with X-DIAG |
| X-MAX | PA1 | 24 | Share with E0-DIAG | |
| Y-MIN | PB13 | 52 | Share with Y-DIAG | |
| Y-MAX | PA2 | 25 | Share with E1-DIAG | |
| Z-MIN | PA0 | 23 | Share with Z-DIAG | |
| Z-MAX(Probe) | PA3 | 26 | Share with E2-DIAG | |
| FAN/RGB | FAN0 | PA13 | 72 | |
| FAN1 | PA14 | 76 | ||
| FAN2 | PB2/BOOT1 | 37 | ||
| LED-R | PB6 | 92 | Can be used for fan3 | |
| LED-G | PB5 | 91 | Can be used for fan4 | |
| LED-B | PB7 | 93 | Can be used for fan5 | |
| 5V-LED(WS2812) | PD3 | 84 | Share with flash indicator(Bootloader) | |
| Heating | E0-Heater | PB15 | 54 | |
| E1-Heater | PC8 | 65 | ||
| E2-Heater | PB3 | 89 | ||
| Heated-Bed | PB4 | 90 | ||
| Temperature | TE0(THERM0) | PC0 | 15 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. |
| TE1(THERM1) | PC1 | 16 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| TE2(THERM2) | PC2 | 17 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| TE3(THERM3) | PC3 | 18 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| TE4(THERM4) | PB1 | 36 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| TB(THERM3) | PB0 | 35 | A 4.7kOhm 0.1% temperature sensor pull up resistor is used,PT1000 can be connected directly. For PT100, an amplifier board must be used. | |
| EXP2 | LCD_D7 | PD1/CAN-TX1 | 82 | Share with CAN-TX1 |
| LCD_D6 | PD0/CAN-RX1 | 81 | Share with CAN-RX1 | |
| LCD_D5 | PC12/MOSI3/TX5/SDA2 | 80 | ||
| LCD_D4 | PC10/SCK3/TX3/4 | 78 | ||
| LCD_EN | PC11/MISO3/RX3/4 | 79 | ||
| LCD_RS | PD2/RX5 | 83 | ||
| ENC_C | PA8/SCL3 | 67 | ||
| BEEP | PC9/SDA3 | 66 | ||
| DX11系列 | RESET | NRST | 14 | |
| ENC_A | PC6/TX6 | 63 | ||
| ENC_B | PC7/RX6 | 64 | ||
| SD-DET | PB10/SCL2 | 47 | ||
| SD-MISO | PA6/MISO1 | 31 | ||
| SD-MOSI型 | PA7/MOSI1型 | 32 | ||
| 鳞片 | 聚酰胺5/SCK1 | 30 | ||
| 客服 | 聚酰胺4/CS1 | 29 | ||
| EEPROM(4K) I2C 引脚排列 | 标准及校正实验所 | 溴化二苯8/SCL1 | 95 | 连接24LC32(4K EEPROM) |
| SDA的 | PB9/SDA1型 | 96 | 连接24LC32(4K EEPROM) | |
| Pi_PWR/UART | 德克萨斯州 | 聚酰胺9/TX1 | 68 | |
| 接收 | 聚丙烯酸甲酯10/RX1 | 69 | ||
| SWD 调试 | PA13/SWDIO型 | 72 | 现在仅用于调试,可用于其他目的。 | |
| PA14/SWCLK系列 | 76 | 现在仅用于调试,可用于其他目的。 | ||
4. 固件指南¶
Spider 支持 Marlin 固件、Klipper 固件和 RRF 固件。选择您需要的一个。
4.1 马林鱼¶
4.1.1 下载Vscode+platformio¶
若要编译固件,需要安装 Visual Studio Code 和 platformio pulg-in。
4.1.2 下载固件¶
Marlin 固件位于此存储库的文件夹中,您也可以从最新的 Marlin bugfix-2.0.x 分支获取固件。您需要在文件中启用以下定义firmware/Marlinconfiguration.h
#define MOTHERBOARD BOARD_FYSETC_SPIDER
#define SERIAL_PORT -1然后我们需要更改文件platformio.ini
default_envs = FYSETC_S6(对于旧的引导加载程序,引导地址是,见下文)0x10000
default_envs = FYSETC_S6_8000(对于新的引导加载程序,引导地址是,见下文)0x8000
注意:自 2021/06/23 起,bootloader 启动地址已更改为 0x08008000,您可以在 github 或 gitee 查看引导加载程序详细信息,也可以在此处查看 Marlin PR。
4.1.3 编译固件¶
打开 Vscode 并打开 platformio 主页,然后单击“打开项目”按钮,然后直接到您放置固件的文件夹。
 3D打印 蜘蛛主板 第31张")
如果一切顺利,您可以在底部看到几个按钮
 3D打印 蜘蛛主板 第32张")
复选标记用于编译,点击即可编译。您可以找到 built at 或 folder。firmware.bin.pio\build\FYSETC_S6.pio\build\FYSETC_S6_8000
4.1.4 上传固件¶
请在此处遵循固件更新指南。
4.2 克利珀(Klipper)¶
我们把Klipper相关的文件放在这个仓库的文件夹里。请阅读那里的自述文件。printer.cfgfirmware/Klipper
如果您想使用 Klipper。您需要按照 Klipper 安装指南先安装 Klipper。当我们尝试编译它时,我们需要调用选择编译选项,请选择 Spider 的选项,如下所述。make menuconfig
4.2.1 菜单配置¶
请为 Spider 选择这些选项,您需要根据您的电路板和某些选项的接线来决定选择哪个选项。
使
extra low-level configuration options¶微控制器架构¶选择
STMicroelectronics STM32处理器型号¶选择
STM32F446时钟参考¶选择
12 MHz crystal引导加载程序偏移量 选择32kib bootloader
如果在 Klipper 中选择偏移量。然后你需要刷写第一个命名的蜘蛛板引导加载程序(如果你拿到你的蜘蛛板后,不用担心,引导加载程序出厂时就在板子上,如果没有,先刷新)。引导加载程序位于此存储库中命名的文件夹中,请按照引导加载程序文件夹(github 或 gitee)中的 README 刷新引导加载程序。我们为您提供带有命名和的预构建固件,请在此处找到它们 github gitee。如果 Klipper 更新,这些预构建固件将过时,并且与您新下载的 Klipper 不匹配并导致烦人的问题。我们将尝试赶上 Klipper,但我建议自己构建固件。32kiB bootloadermake menuconfigBootloader_FYSETC_SPIDER2021/06/23bootloader32KiB bootloaderklipper-32k-USB.binklipper-32k-UART.bin
 3D打印 蜘蛛主板 第33张")
通讯接口¶
你这里有两个选择,如果你使用USB线连接RaspeberryPI和Spider,你需要检查。如果您使用串口连接 RaspberryPI 和 Spider,请检查 .1. USB (on PA11/PA12)2. Serial (on USART1 PA10/PA9)
1. USB(在 PA11/PA12 上)¶
如果您想使用 USB 数据线将 Spider 连接到 RaspberryPI。您需要选择USB (on PA11/PA12)
 3D打印 蜘蛛主板 第34张")
您需要按如下方式设置序列号。我们在这里提供了 VORON 2 机器的示例 cfg 文件。printer.cfgprinter.cfg
Obtain definition by "ls -l /dev/serial/by-id/" then unplug to verify
##--------------------------------------------------------------------
serial: /dev/serial/by-id/usb-Klipper_stm32f446xx_230032000851363131363530-if002. 串行(在 USART1 PA10/PA9 上)¶
如果要将 Spider UART1(RX1:PA10, TX1:PA9) 端口连接到 RPI uart0(TX:GPIO14,RX:GPIO15) 端口,您需要选择Serial (on USART1 PA10/PA9)
 3D打印 蜘蛛主板 第35张")
In you need to uncomment the following line as our example file here (github gitee)do, if your cfg file don't have this line, please add it.printer.cfgprinter.cfg
serial: /dev/ttyAMA0Besides this make option, you still need to follow the instructions that file says, you can find the file github or gitee.Connect RPI uart.md
3. CAN bus (on PD0/PD1)¶
 3D打印 蜘蛛主板 第36张")
编译并上传固件后,您需要按照此处的 Klipper CANBUS 说明进行操作 CANBUS - Klipper 文档。
4.2.2 编译固件¶
make4.2.3 上传固件¶
请在此处遵循固件更新指南。
4.3 RRF¶
由于 RRF 固件需要超过 512KB 的闪存空间,因此配备 446 的 Spider 无法满足其要求。所以它需要禁用一些功能才能使其工作,请查看固件/RRF 文件夹 github gitee 中的 README。
4.4 固件上传¶
我们提供了多种上传固件的方法,包括 SDCARD(卡刷)、dfu-util、DFU 和 platformio。
4.4.1 上传固件(SDCARD卡刷)¶
使用 SD 卡上传固件是我们更新固件的默认方式,因为 Spider 在出厂时已经有引导加载程序。但是如果你曾经将固件上传到 Spider flash 地址,那么 Spider 中的引导加载程序就会消失,那么你需要自己将引导加载程序上传到 Spider,请按照 bootloader 文件夹(github 或 gitee)中的 README 上传引导加载程序。0x08000000
使用SD卡上传固件:将编译好的固件文件(如果使用klipper固件,则需要重命名为)文件复制到SD卡中,并将其插入板子右侧的SD卡槽中,然后给板子上电。您可能需要等待大约 30 秒才能完成上传,上传时 SD 卡插槽旁边有 LED 闪烁。
• 正常的情况加建议大家用卡刷的方式来烧录固件,如果主板的Bootloader被破坏,没有办法进行卡刷,可以用以 下方式来恢复主板的Bootloader。
• 什么是Bootloader,其实它是一段特殊的程序,他会在主板上电的时候检测TF卡槽内是否插入了卡片,如果已经 插入了TF卡,它会去卡片内检索是否有firmware.bin文件存在,如果有这个文件存在,便开始更新主板MCU Flash存储 器内部的程序,更新完成后会将firmware.bin重命名为old.bin。如果主板上电启动的时候,没有发现TF卡,或者TF卡里 没有firmware.bin文件,Bootloader将会自动跳转到Bootloader offset设定的地址,运行我们烧录进去的程序。所以一 旦Bootloader offset设置错误以后,固件虽然烧录进去了,但是主板往往是不会正常工作的。
Bootloader 即引导程序,是放置在主控存储 flash 空间开头一段的代码,主要作用是使主板具有卡刷的功能。由于历史原因,我们提供了两个版本的 bootloader(引导程序),分别是 32k bootloader `Bootloader_FYSETC_SPIDER.hex` 和 64k bootloader `Bootloader_FYSETC_SPIDER_10000.hex`, 但是从 2021/06/23 起,64k bootloader 不再使用,新蜘蛛主板出厂自带 32k bootloader。但因为旧主板 (2021/06/23前出厂的) 出厂自带的是 64k bootloader,所以为了兼容,还是提供了 64k 的 bootloader. 推荐旧主板可以按下面的说明更新为 32k bootloader.
• 下载并安装烧录软件stm32cubeprogrammer  3D打印 蜘蛛主板 第37张") 这个好用SetupSTM32CubeProgrammer_win64.exe
这个好用SetupSTM32CubeProgrammer_win64.exe
• 下载蜘蛛主板的bootloader固件  3D打印 蜘蛛主板 第38张") Bootloader_FYSETC_SPIDER.hex
Bootloader_FYSETC_SPIDER.hex
4.4.2 上传固件(dfu-util)¶
此方法适用于 linux,这意味着应该在树莓派中起作用。
步骤 1。首先进入DFU模式¶
首先关闭电路板电源
在 5V 引脚和 DC5V 上设置跳线
 3D打印 蜘蛛主板 第39张")
将跳线放在 BT0 到 3.3V 引脚上
 3D打印 蜘蛛主板 第40张")
将 USB 电缆连接到开发板和计算机
用 24v 给电路板上电
现在板处于DFU模式。如果没有,请单击重置按钮。您也可以用 5V 给板上电,但您需要在 5V 和 USB5V 上设置跳线(检查板背面的丝印标签),但不要在 5V 和 DC5V 上设置。
如果您完成固件上传,请记住删除 BT0 跳线,否则它将再次进入 DFU 模式。
第2步。安装 DFU-UTIL¶
确保安装了 dfu-util,shoot 命令进行检查。dfu-util --version
示例输出:
dfu-util 0.9
Copyright 2005-2009 Weston Schmidt, Harald Welte and OpenMoko Inc.
Copyright 2010-2016 Tormod Volden and Stefan Schmidt
This program is Free Software and has ABSOLUTELY NO WARRANTY
Please report bugs to http://sourceforge.net/p/dfu-util/tickets/如果没有,您应该先安装它,使用发行版的包管理器来获取最新版本,例如
sudo apt-get install dfu-util第 3 步。使用命令上传固件¶
然后使用以下命令上传固件。您应该将下面替换为您构建的固件 bin(或十六进制)文件位置,例如 .将闪存地址更改为您选择的引导加载程序。(如果你使用的是 Marlin 固件,并且你的 platformio env 是 ,那么你需要把它设置为 ,如果 env 是 ,那么你需要把它设置为 。如果您使用 klipper 固件并在编译时选择启动地址,则设置它,如果 ,则设置它。如果将其设置为 。如果您的十六进制文件,请将其设置为)。firmware.binout/klipper.bin0x08008000default_envs = FYSETC_S60x08010000default_envs = FYSETC_S6_80000x08008000No bootloader0x0800000032kiB bootloader0x0800800064KiB bootloader0x080100000x08000000
dfu-util -R -a 0 -s 0x08008000:leave -D firmware.bin4.4.3 上传固件(DFU)¶
上传固件的另一种方法是使用DFU。
第1步。下载 STM32CUBEPROGRAMMER¶
您可以从ST网站下载。
https://www.st.com/zh/development-tools/stm32cubeprog.html
打开STM32CubeProgrammer软件。
 3D打印 蜘蛛主板 第41张")
第2步。进入DFU模式¶
首先关闭电路板电源
在 5V 引脚和 DC5V 上设置跳线
 3D打印 蜘蛛主板 第42张")
将跳线放在 BT0 到 3.3V 引脚上
 3D打印 蜘蛛主板 第43张")
将 USB 电缆连接到开发板和计算机
用 24v 给电路板上电
现在板处于DFU模式。如果没有,请单击重置按钮。您也可以用 5V 给板上电,但您需要在 5V 和 USB5V 上设置跳线(检查板背面的丝印标签),但不要在 5V 和 DC5V 上设置。
如果您完成固件上传,请记住删除 BT0 跳线,否则它将再次进入 DFU 模式。
第 3 步。上传固件¶
现在您可以通过以下操作将 Spider 板与 stm32cubeprogrammer 连接并烧录。
 3D打印 蜘蛛主板 第44张")
按照屏幕截图中显示的红色数字进行操作。
单击按钮以找到DFU端口。
连接DFU
选择“firmware.bin”文件。(或 .hex 文件)。
填写“起始地址”(如果你使用的是 Marlin 固件,并且你的 platformio env 是 ,那么你需要把它设置为 ,如果 env 是 ,那么你需要把它设置为 。如果您使用 klipper 固件并在编译时选择启动地址,则设置它,如果 ,则设置它。如果将其设置为 。如果你的是十六进制文件,则无需设置任何内容)。
default_envs = FYSETC_S60x08010000default_envs = FYSETC_S6_80000x08008000no bootloader0x0800000032kiB bootloader0x0800800064KiB bootloader0x08010000开始编程
4.4.4 上传固件(platformio)¶
如果您自己使用 platformio 编译 Marlin,您可以按照以下说明上传固件。
步骤 1。首先进入DFU模式¶
首先关闭电路板电源
在 5v 引脚和 DC5V 上设置跳线
 3D打印 蜘蛛主板 第45张")
将跳线放在 BT0 到 3.3V 引脚上
 3D打印 蜘蛛主板 第46张")
将 USB 电缆连接到开发板和计算机
用 24v 给电路板上电
现在板处于DFU模式。如果没有,请单击重置按钮。您也可以用 5V 给板上电,但您需要在 5V 和 USB5V 上设置跳线(检查板背面的丝印标签),但不要在 5V 和 DC5V 上设置。
如果您完成固件上传,请记住删除 BT0 跳线,否则它将再次进入 DFU 模式。
第2步。点击上传按钮上传固件¶
 3D打印 蜘蛛主板 第47张")
4.5 测试固件¶
如果您怀疑您的主板有问题,您可以使用我们的测试固件进行测试。请在此处遵循自述文件(github gitee)。
5. 问题拍摄¶
5.1 蜘蛛 3.3v 问题¶
5.2 TMC2209连接问题¶
修复 1 : 请在蜘蛛板上的每个TMC2209上添加跳线。然后再次重新启动机器。
 3D打印 蜘蛛主板 第48张")
修复2:尝试拍摄Klipper命令
INIT_TMC STEPPER=name 可以是 ,而 其他步进器在您的 .stepper_xstepper_yprinter.cfg
5.3 未更改为firmware.binold.bin¶
修复 1:重新刷新引导加载程序,按照此处的说明进行操作( github gitee )。
修复2:如果您使用Klipper固件,请在编译时选择选项,并将固件上传到闪存地址。请参阅上传固件(dfu-util)或上传固件(DFU)章节。No bootloader0x08000000
6. 如何购买¶
7. 技术支持¶
您可以在我们的 github https://github.com/FYSETC/FYSETC-SPIDER/issues 中提交问题 或将任何技术问题提交到我们的论坛
https://github.com/FYSETC/FYSETC-SPIDER
8. 相关文章¶
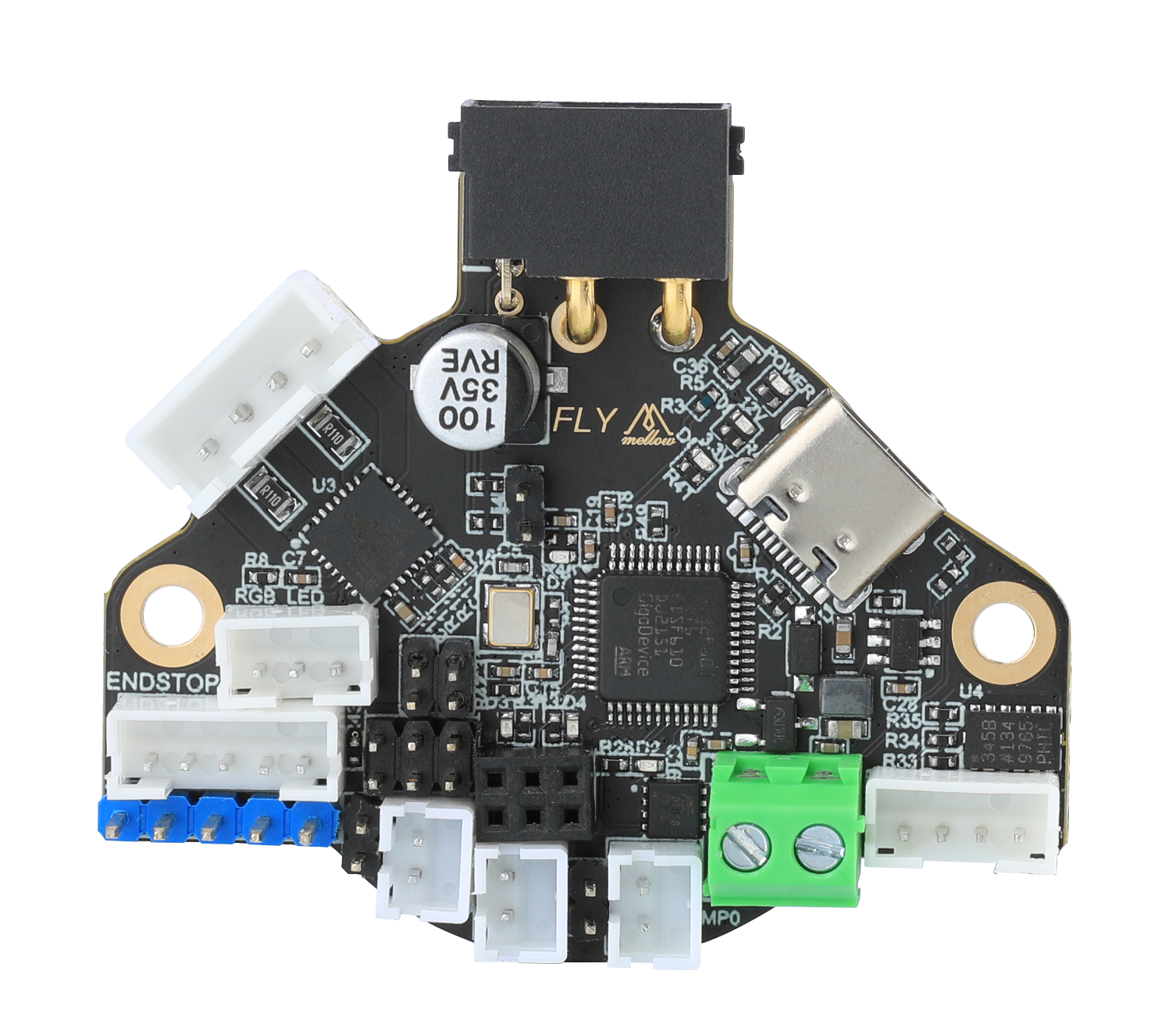
蜘蛛主板+SB can板配置及固件烧录教程
本视频详细讲解了蜘蛛主板3.0和SB can 板配置及固件烧录教程。蜘蛛2.3如果使用can收发器和3.0参数设置一模一样。ucan的话选带usb字样的can。2.3只需要插一个跳线帽:3v3/boot
蜘蛛2.3与新版ebb使用can桥接模式配置教程
视频演示教程基于《如何使用八爪鱼的CAN接口 小雨V1.32》 图中所展示的can转接板为大树蜘蛛Can转接板打包文档地址为:https://www.aliyundrive.com/s/oPSGqbExbaG
 3D打印 蜘蛛主板 第49张")
直接双击就可以解压。我没有使用辫子方案所以我的x限位没有改,还有一件事,这个1.25端子是真费眼睛。
其他链接:







还没有评论,来说两句吧...