


 摘要:
...
摘要:
... SB CAN TH

1. 引言¶
SB CAN工具板是一款高度集成的打印头控制板。基于STM32F072,运行 Klipper 固件。板载TMC2209步进电机驱动器、AXL345加速度传感器等必要接口。并配有 2.5 米 4 芯电缆,开箱即用。
1.1 特征¶
基于STM32F072
板载 1M CAN 收发器
机载TMC2209
2x 0.5A MAX PWM 接口,用于可控风扇(默认 VIN 电源,5V 可选)
1x 信号输入接口(VIN 电源,带电平转换)
2x信号输入输出接口(5V电源,带上拉电阻)
1X 5V 单线 RGB 接口(最大 1A )
1x 4A MAX PWM 输出,用于加热棒
1x ADC接口,用于加热棒温度采集
MX3.0 2X2 接口,用于电源和 CAN 信号访问
1 个 Micro USB 用于固件上传
随附 2.5m 4 芯电缆,2x16AWG+2x24AWG
配有端子外壳和电线压接片
2. 硬件指南¶
2.1 安装¶
在安装电路板之前,您需要在此处打印部件。然后按照以下 5 个步骤操作。
您的 Stealburner 应该有带有热插件的孔。
3D打印pcb_spacer。STL公司
将 PCB 放在该位置
将其拧到打印头上并pcb_spacer。STL公司
按照本章连接外围设备并盖上盖子。
2.2 wiring
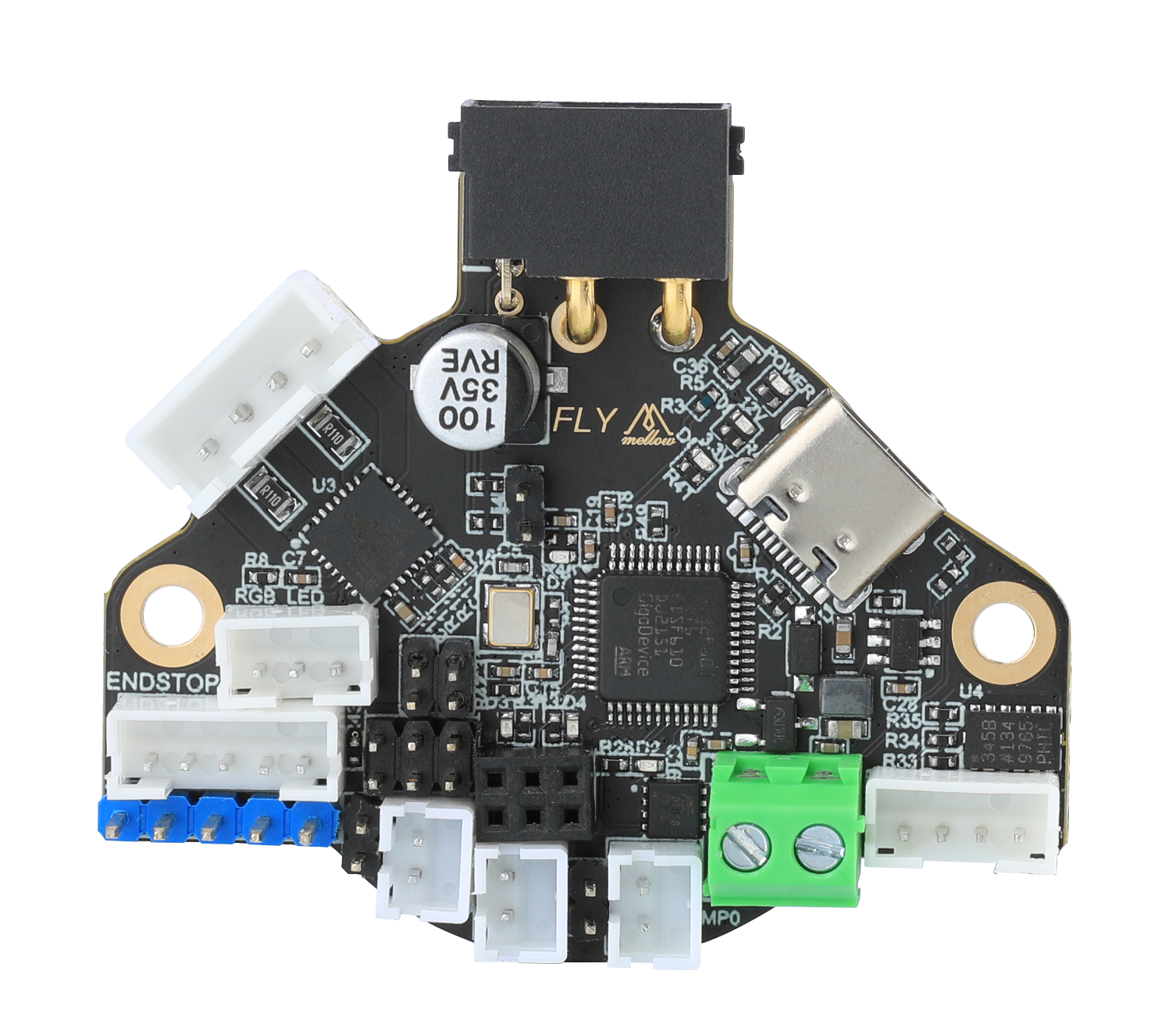
2.2 连接器¶
| 连接器名称 | 类型 | 详 |
|---|---|---|
| IO.2 | PH2.0-3P型 | PB7,用于输入和输出,硬件上拉 10k 电阻至 3.3v,带 1k 串联电阻。 示例:端挡块 |
| IO.1 | PH2.0-3P型 | PB11,用于输入和输出,硬件上拉 10k 电阻至 3.3v,带 1k 串联电阻。 示例:端挡块 |
| IN.0 | PH2.0-3P型 | PB6,默认24v,带电平转换器,上拉至3.3v |
| 发动机 | PH2.0-4P型 | TMC2209 EN : PB4 DIR : PA5 步长 : PA7 传播 : PA15 DIAG : PB5 索引 : PB3 RX : PA10 TX : PA9 |
| 输入 | MX3.0 2X2P 接口 | 最大 24v 5A 输入(16AWG)/CANL,CANH (24AWG) |
| TE0 | PH2.0-2P型 | PA0,ADC,4.7K上拉至3.3V |
| HE0 | XH2.54-2P型 | PA8,MAX 4A,PWM输出,推荐最大功率:60W |
| 范0 | PH2.0-2P型 | PA2,0.5A MAX PWM,用于风扇控制(默认VIN,5V可选) |
| 范1 | PH2.0-2P型 | PA3,0.5A MAX PWM,用于风扇控制(指定VIN,5V可选) |
| RGB格式 | PH2.0-3P型 | PB1,1A MAX 信号线 RGB 端口,5V,用于 NeoPixel,WS2812 |
| 微型 USB | 用于固件更新和 USB 通信。固件更新:先插入USB,然后开机。 USB通信:先开机,再插入USB端口 |
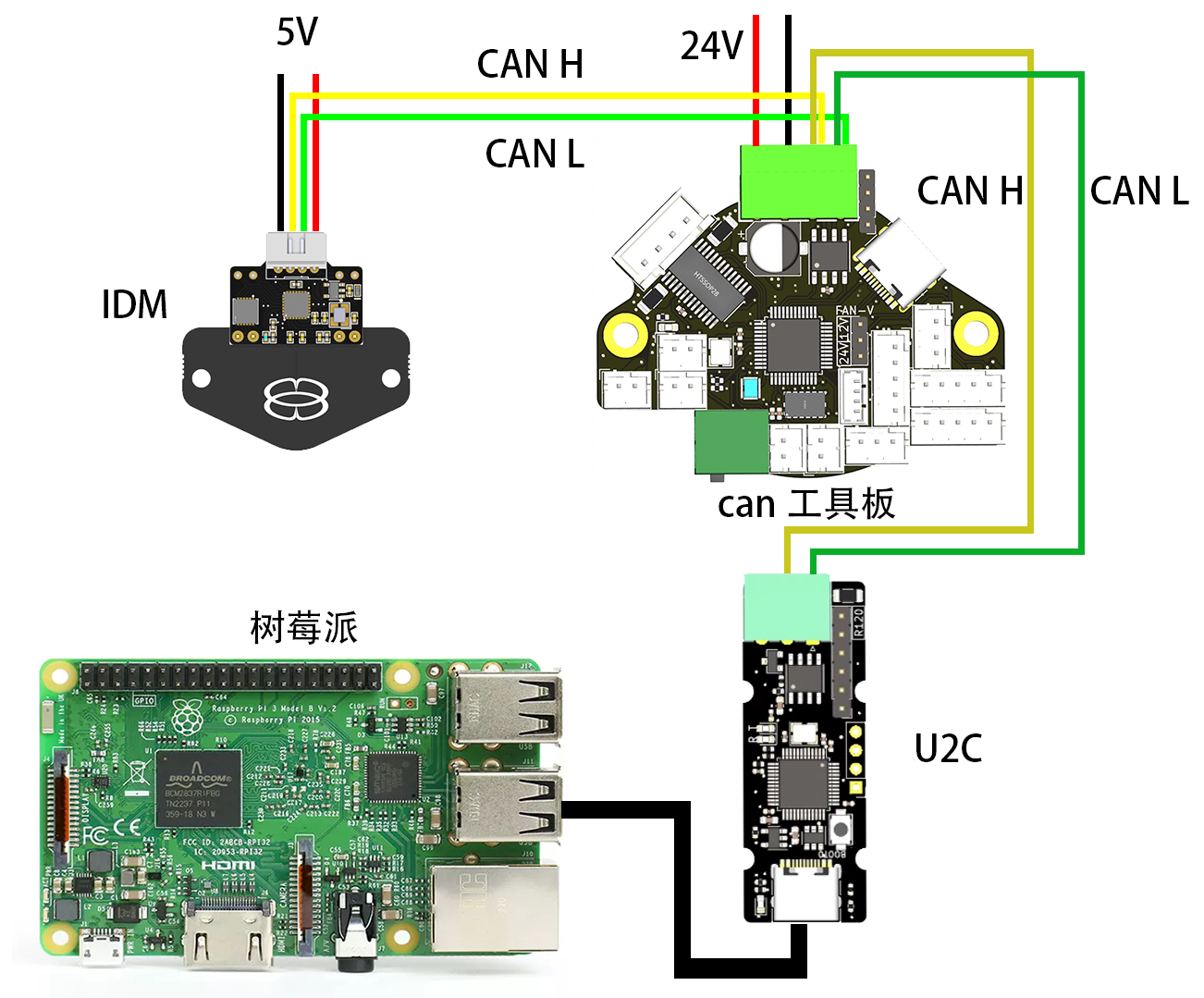
2.3 接线¶
如下图所示,您不仅会收到一个 SB CAN Tollhead 板,还会收到一个 2.5 米的连接器和一些连接器以及一根 USB 电缆。
版本1.1¶
1.3版¶
注意
Klipper 目前支持主板的 USB 转 CAN 桥接模式。您可以将主板用作 Raspberry Pi 上的 CAN 适配器,不再需要 UCAN。
2.4 SCH DXF步进¶
在 github 上获取 SCH、DXF、STEP 文件:
GitHub - FYSETC/FYSETC_SB_CAN_TOOLHEAD:用于 VORON 的 StealthBurner 工具头 CAN 总线模块
3. 固件指南¶
这只是 Klipper 固件支持。如果您是 Klipper 初学者,请在此处查看 Klipper 固件版本: 安装 - Klipper 文档
3.1 menu配置¶

3.2 固件上传¶
危险
不要热插拔 24V,因为有一定的概率损坏板上的 5A 保险丝。您可以插入SB CAN工具头的24V插座,然后从电源上打开和关闭24V电源!对于 V1.3 版本,只需插入 USB 数据线并按下重置按钮即可。无需重新开通 24V 电源!
对于 V1.1¶
板上有Micro-USB端口,用于固件上传。请按照以下顺序操作。
使用 USB 数据线将 SB-CAN-TH Micro-USB 连接到 Raspberry Pi USB-A 端口
将 SB-CAN-TH 板 24v 插座插入机器 PSU
打开树莓派(或其他 SBC)的电源并等待它启动就绪。
为SB-CAN-TH板打开24v PSU电源
在 Raspberry 中执行 shoot 命令以检查它是否显示 DFU 端口,如果没有,请返回步骤 1
lsusb拍摄命令
dfu-util -R -a 0 -s 0x08000000:leave -D out/klipper.bin拔下 Micro-USB 数据线和 SB-CAN-TH 插座 5 秒,然后再次插入 SB-CAN-TH 插座。
完成
对于 v1.3¶
板上有Micro-USB端口,用于固件上传。以及用于MCU复位的复位按钮,按照以下顺序操作。
使用 USB 数据线将 SB-CAN-TH Micro-USB 连接到 Raspberry Pi USB-A 端口
将 SB-CAN-TH 板 24v 插座插入机器 PSU
打开树莓派(或其他 SBC)和 PSU 的电源,等待 pi 启动准备就绪。
按住重置按钮 2 秒钟,然后松开
在 Raspberry 中执行 shoot 命令以检查它是否显示 DFU 端口,如果没有,请返回步骤 1
lsusb拍摄命令
dfu-util -R -a 0 -s 0x08000000:leave -D out/klipper.bin拔下 Micro-USB 数据线和 SB-CAN-TH 插座 5 秒,然后再次插入 SB-CAN-TH 插座。
完成
3.3 配置¶
在此处获取 Klipper 配置文件,您需要按照 CANBUS - Klipper 文档获取 CAN ID:
4. 日志和已知问题¶
4.1 版本 1.1¶
注意:v1.1 下面有一些丝印错误,红色字母是正确的丝印。
4.2 v1.3 的新功能¶
更换了最大可承载15A电流的连接器和连接线(板载保险丝限制为8A);
添加复位按钮;
改用6层2OZ PCB板,增强散热;
增加一个120R终端电阻,可通过JP3断开,默认连接;
更换加热棒连接器以承载更大的电流,最高可达7A;







还没有评论,来说两句吧...